![]()
![]()
![]()
![]()

![]()
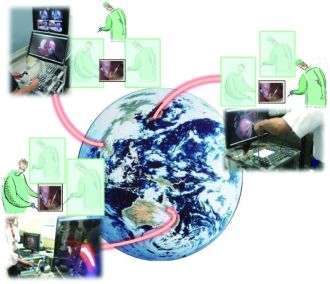 |
研究内容これまで,医師は長い臨床経験と動物実験を介してその技量の向上をはかってきましたが,近年は,患者の負担や動物愛護の観点から,VRシミュレータを用いる外科手術訓練への期待が高まっています. そこで本研究の目的は,実世界における「触感」を提供し,さらに,コンピュータ支援により実世界では直接視ることも触ることもできない物体表面下の内部の透視や触知感を与える,独自の超臨場感遠隔触覚協働環境を実現することです.そのために,非一様な変形特性を示す生体組織のモデリングや柔軟物シミュレーション,生体組織構造の半透明可視化,遠隔協働VR環境自動構築などのIRT (Information Robot Technology)に基づく基盤技術を構築し,それらを遠隔協働低侵襲手術訓練に応用しています. |
メンバー
研究代表者
田中 弘美(立命館大学情報理工学部 知能情報学科)
分担者
平井 慎一(立命館大学理工学部 ロボティクス学科) 【ホームページ】
田中 覚(立命館大学情報理工学部 メディア情報学科) 【ホームページ】
仲田 晋(立命館大学情報理工学部 メディア情報学科)
島田 伸敬(立命館大学情報理工学部 知能情報学科) 【ホームページ】
李 周浩(立命館大学情報理工学部 情報コミュニケーション学科)
森川 茂廣(滋賀医科大学 MR 医学総合情報センター)
来見 良誠(滋賀医科大学 医学部)
小森 優(滋賀医科大学 医学部)
山口 哲(大阪大学 歯学部)
Wang Zhongkui(立命館大学理工学部 ロボティクス学科)
![]()
![]()