![]()
![]()
![]()
![]()
- 物体間の摩擦特性抽出
研究背景
仮想空間においてリアリティの高いシミュレーションを実現するために, 対象物体の三次元形状,
テクスチャなどの視覚情報だけでなく,
重量, 摩擦, 弾性力などの触覚情報が必要である.
研究目的
本研究では「触れて視る」のハプティックビジョン(図1)に基づき, 実世界に存在する対象物体と支持面との間の
摩擦特性を
能動的かつ自動的に抽出する方法を提案する.

図1:ハプティックビジョンシステム
対象物体と支持面との摩擦特性として, 本研究では摩擦における前滑り現象が考慮されているLuGreモデルを採用する.
図2(中央)に示すように剛毛ベース解釈を基に,無原則である剛毛の振る舞いを平均化したモデルが,LuGre(Lund-Grenoble)モデルである.
LuGreモデルは図2(右)のようにバネとダンパで構成され,平均化された剛毛が最大に歪む時に滑り出すモデルである.
また,並列的に動くもう一つのダンパによって粘性摩擦を表すことができる.
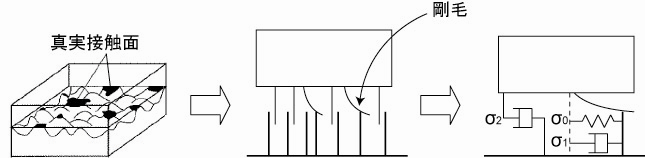
図2:LuGreモデル
手法
LuGreモデルの未知のパラメータを抽出するには,Push操作時(図3)における,位置と反力(摩擦力)データが必要であり,
これらのデータを正確に測定するために,対象物体が並進運動していることが条件となる.
図4は,Push操作時において,
CCDカメラで観測した対象物体の移動軌跡を示し,図5は,
摩擦力の取得に使用する6軸の力覚センサの
X(水平),Y(重力),Z(進行)方向における反力データを示す.
これらのデータより対象物体が並進運動していることを確認する.
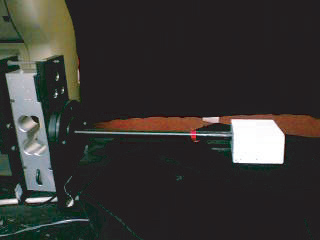
図3:2物体間の摩擦力獲得のためのPush操作
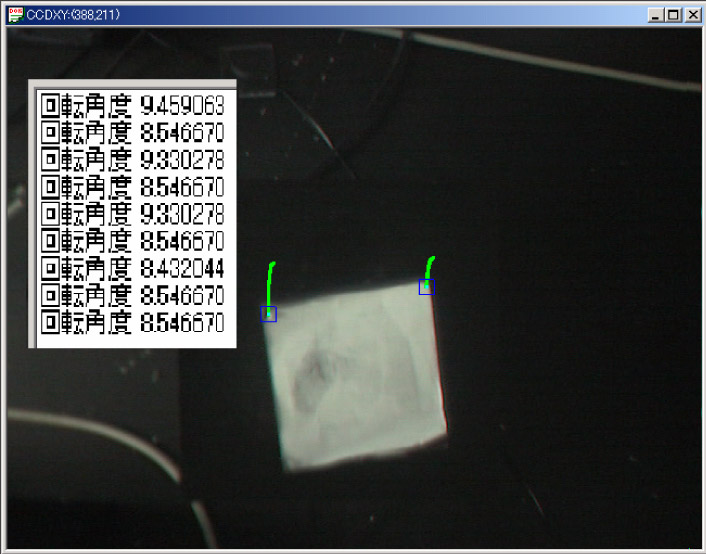
図4:並進運動確認のための対象物体の移動軌跡
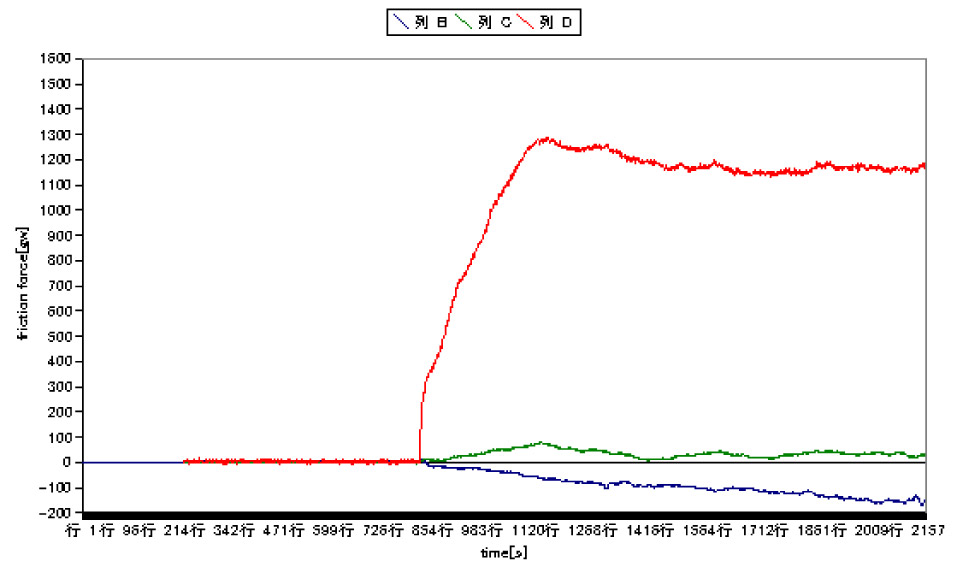
図5:各軸における摩擦力データ
結果
・LuGreモデルパラメータ推定結果
対象物体として、アルミブロック(2700g)と厚紙を使用し、獲得された摩擦データから最適化によってLuGreモデルの未知のパラメータを推定した。
推定結果を図6に示す。
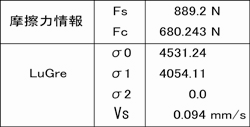
図6:LuGreモデルパラメータ推定結果
・他の摩擦モデルとの比較によるLuGreモデルの評価
LuGreモデルの有効性を示すため、ハプティックビジョンより獲得した摩擦力データと、
そのデータを摩擦モデル式(Coulomb, Dahl, LuGre)で近似したグラフとの比較を行った。対象として、アルミブロック(2700g)と厚紙、
鉄ブロック(3120g)と木の板、木のブロック(1965g)と木の板を使用し、それぞれ3回実験を行った。図7は、アルミブロック(2700g)と
厚紙を使用した場合における摩擦データ(赤線)と、そのデータから推定したモデル式(順にCoulomb, Dahl, LuGre)のグラフ(青線)を示す。
また、図8は各実験における摩擦データとモデル式の誤差標準偏差を示す。
図8よりLuGreモデルにおいて誤差標準偏差が最も小さいことから、LuGreモデル式が実際の
摩擦力データの変位に最も近いことが確認された。
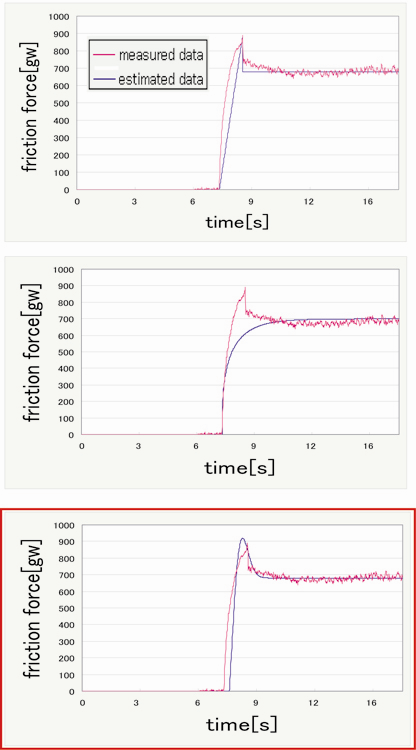
図7:摩擦力データと摩擦モデル式グラフ
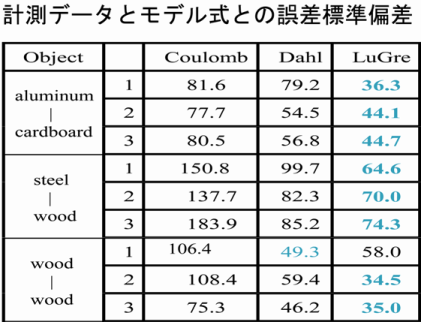
図8:計測データとモデル式との誤差標準偏差
メンバー
山城太(2008/3月卒)
D3 田中士郎
研究業績
- Estimating Friction Characteristics with Haptic Vision,(FCV2007),2007/1/25,オーラル発表 Dai Yamashiro, Nobutaka Shimada, and Hiromi T. Tanaka
- Estimating Friction Characteristics with Haptic Vision,(MPR2007),2007/9/16-17,ポスター発表 Dai Yamashiro and Hiromi T.Tanaka
- Estimation of friction characteristics with Haptic Vision,(FCV2008),2008/1/25,ポスター発表 Dai Yamashiro, Shiro Tanaka, Nobutaka Shimada, and Hiromi T. Tanaka
- ハプティックビジョンに基づく物体間の摩擦特性抽出,(MIRU2008),2008/7/30,ポスター発表 山城太,田中士郎,村井博一,田中弘美
- Active estimation of friction properties with Haptic Vision,(ICARCV2008),2008/12/18,オーラル発表 Shiro Tanaka, Dai Yamashiro, Hiromi T.Tanaka
![]()
![]()
![]()