![]()
![]()
![]()
![]()
![]()
デジタルミュージアム
|
|
遠隔協働可能な和菓子の創作体験システムの開発を行う.和菓子の力学特性の計測・モデル化・提示に関する研究や,無形文化である和菓子創作技術のセンシング・モデル化・再現として,両手多指の触力覚デバイスの開発やリアルタイムレオロジー柔軟物体シミュレーションに関する研究,ネットを介したリアルタイム視触力覚通信システムの開発を行う. |
|
| 浮世絵や能面等の歴史文化財のデジタルアーカイブ化、およびデジタルアーカイブ化された歴史文化財などを触覚や音も合わせて高臨場感で鑑賞するためのシステム生成を目指します。 |

|
|
布や織物のような表面の複雑で微妙な色,光沢や質感を,観測画像データから抽出し高精度にモデリングし,それらを忠実に再現しフォトリアリスティックなレンダリングを実現する. |

|
|
織布の糸の形状や織り構造による微細で複雑な三次元幾何構造や繊維の透過性,光沢をもつ糸の独特な材質などによる布の異方性反射の影響を解明し,反射特性をモデル化することを目標としています. |

ITプラント
|
|
植物工場における植物栽培を計画的に実施するために,植物の特徴を計測・解析し,自動化された低価格な施設や環境で効率よく栽培することを目指す. |

ハプティックビジョン
非一様柔軟物体
|
ハプティックビジョンに基づく非一様柔軟物体の内部領域境界推定 |
|
物体間の摩擦特性抽出
|
ハプティックビジョンに基づく物体間の摩擦特性抽出 |
|
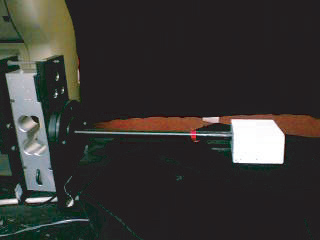
レオロジー物体の粘弾性抽出
|
ハプティックビジョンに基づく能動的レオロジー物体モデリングのための粘弾性パラメータ抽出 |
ボリュームビジュアライゼーション
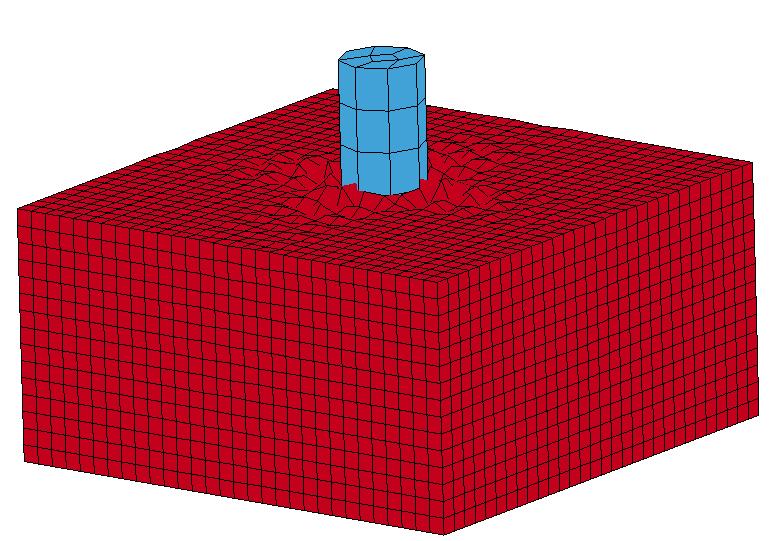
針の穿刺軌道予測
|
穿刺手術では臓器変形は全体にまで及ばず, 針周辺における局所部分のみが変形することに着目し, マルチレートに変形計算部分を更新することによって
高速な穿刺シミュレーションを実現する.
|
剥離シミュレーション
|
内視鏡手術の代表である剥離手技のシミュレータを構築するため, 計算コストが少ない質点ばねモデルを採用し, 連続体におけるせん断の概念を導入する. 複数層柔軟物体モデルの剥離シミュレーションを行い, 精度と計算コストを比較することで, リアルタイムシミュレーションが可能であることを示す. |
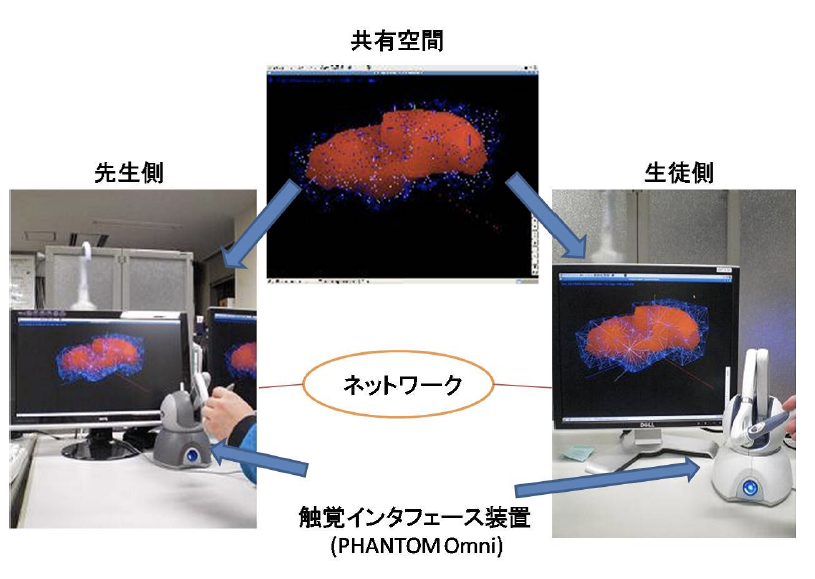
遠隔触覚 |
遠隔地点間で,手術シミュレーションを行うことのできるシステムの構築を目指す.タイムスタンプを用い,ネットワークによる遅延の生じない同期手法を実現し, リアルタイムでの触覚通信の実現を目指す.
|
遠隔手術訓練
|
若手の医師が技術を取得するためには, 様々な経験が必要であり, 現在手術シミュレーションの需要が高まってきている. |
リアルタイムシミュレーション
|
近年,描画処理を行なうためのハードウェアであるGPUを汎用計算に用いるGPGPUが注目を集めている. |

![]()
![]()