![]()
![]()
![]()
![]()
- 非一様柔軟物体の内部境界推定
研究背景
触覚データは、通常「硬い、柔らかい」などの主観で表現されており、医療現場では触覚データの客観化が必要である。 客観的な人体の触覚情報を提示するためには、人体内部組織の境界を実物から観測し、VR上に忠実に再現することが必要である。
研究目的
現在の内部境界の推定装置としてCTなどが挙げられるが、高価で大掛かりであり、電磁波や放射線による人体への負担が否めない。 CTを用いず安価で容易に導入できる力覚センサを用いて人体の筋肉と骨の境界を推定することにより、実世界に忠実な触覚を再現できるVR触診シミュレータの開発を目的としている。
手法
外力を作用した際に伴う反力と変位を解析し、作用点から骨までの距離と骨の法線を推定し、他の推定結果と統合、補完することで人体内部の境界を求めていく。
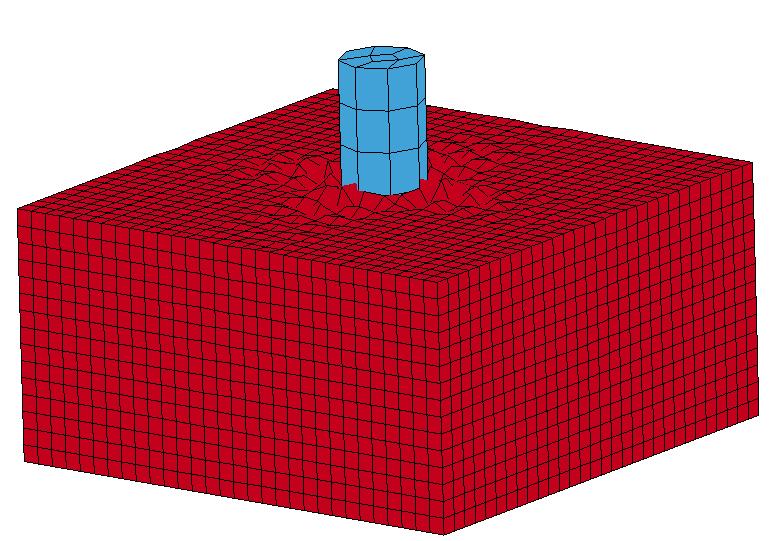
図1:FEMシミュレーションの様子
結果
人肌ゲル内に半球上の剛体を埋め込んだ対象物の内部境界の推定結果

図2:シミュレーション環境

図3:半球面推定値と真値との比較

図4:深さ推定結果
メンバー
D3 山岡 勝
研究業績
![]()
![]()
![]()